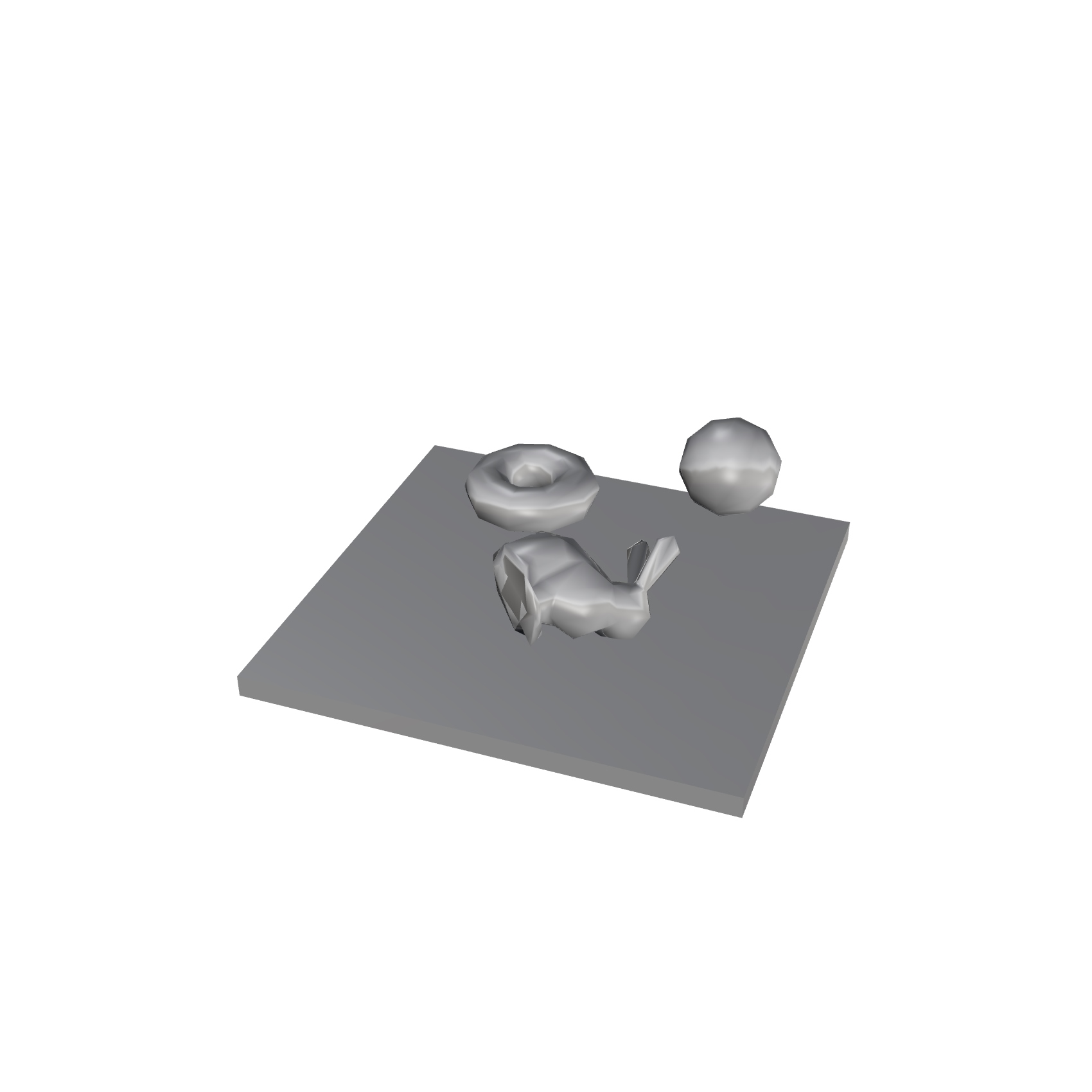
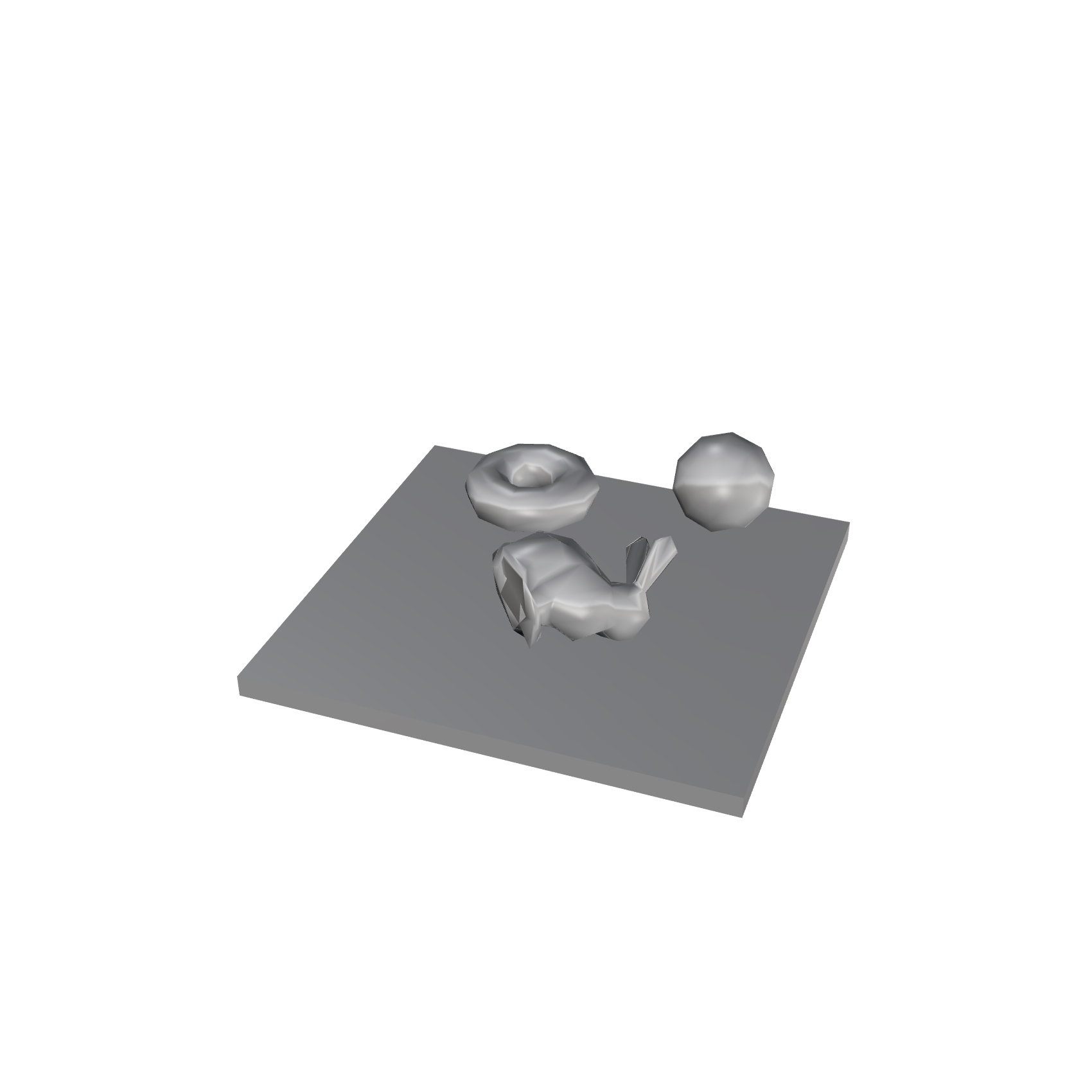
4.1.03. soft collision
![]()
Date published:
August 23, 2022
PROCEDURE
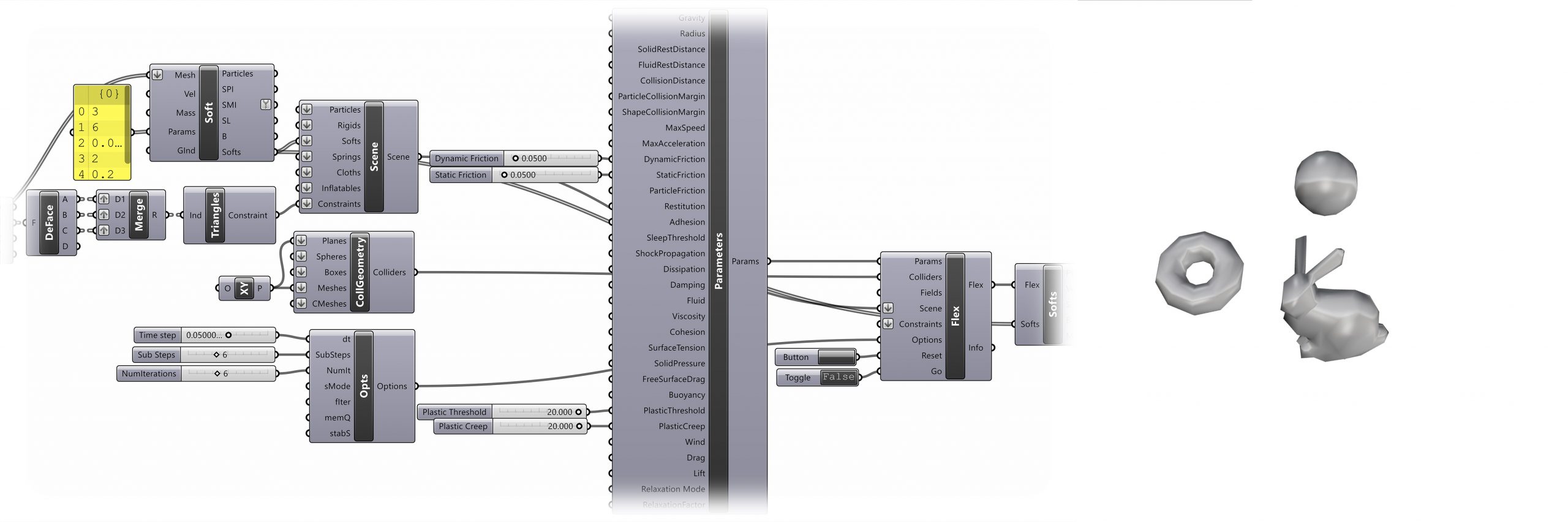
1. Define the mesh sphere as soft body with specific soft parameter
2. Use Triangulated mesh as the soft body constraint
3. Define the XY plane as the collision plane
4. Define the body parameters including the plasticity and friction
5. Run the solver
6. Extract the soft bodies from the flex
7. Preview the mesh in render mode with instant bake
This exercise is using Grasshopper version 1.0.0007
References: Heinz Benjamin, FlexHopper (by Pennjamin), https://www.food4rhino.com/app/flexhopper, Accessed August 6, 2020.